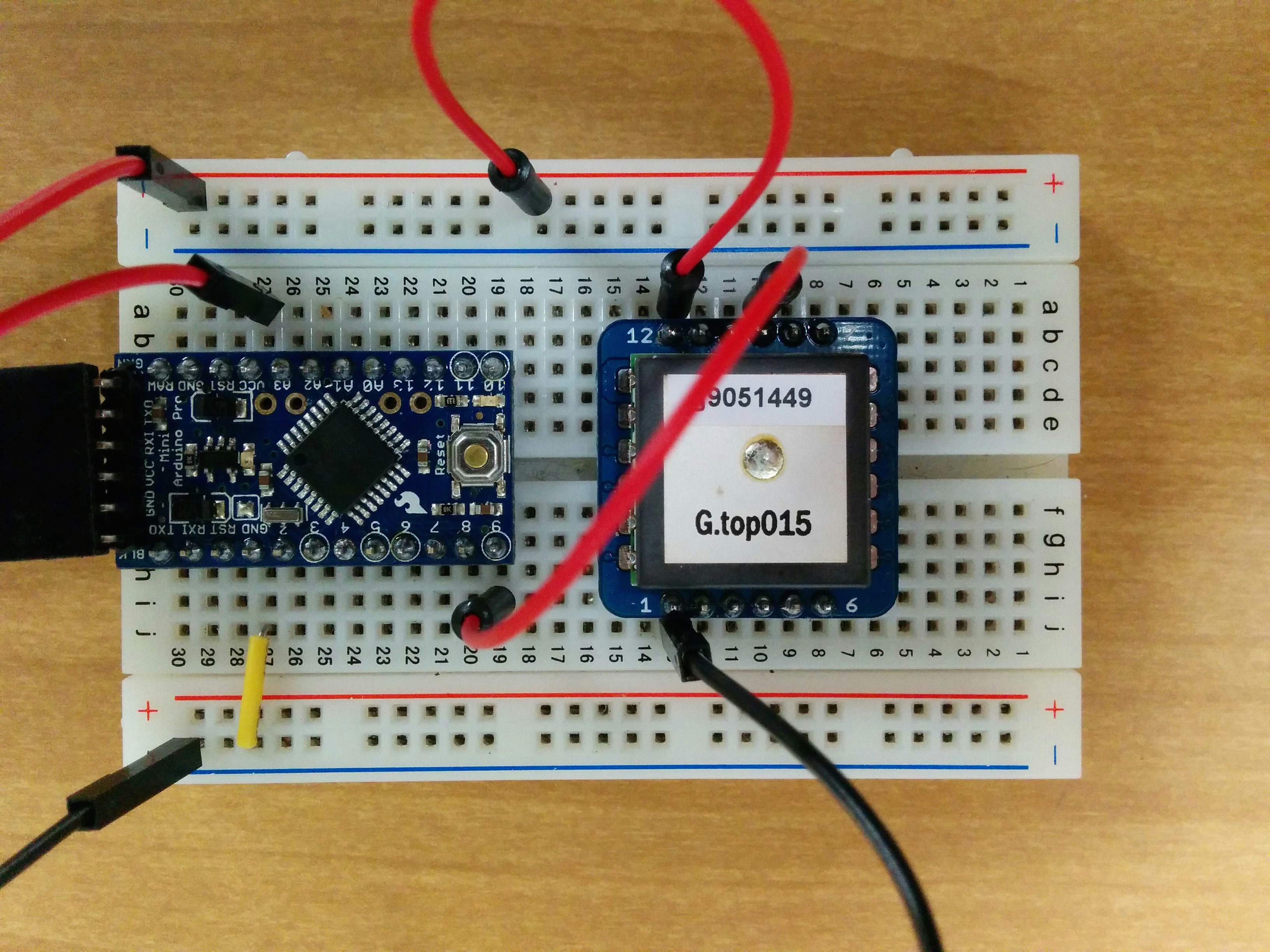
GPS: GMS-G9 ランニングエレクトロニクス
1:GND
9:TXD
12:VCC
Arduino Pro mini
9: RX(software serial)
#include <avr/sleep.h>
#include <avr/interrupt.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
#define __DEBUG__
TinyGPS gps;
SoftwareSerial ss(9, 8);
void setup()
{
Serial.begin(38400);
ss.begin(9600); // GMS-G9
Serial.print("Hello!!!");
}
void loop()
{
bool newData = false;
unsigned long chars;
unsigned short sentences, failed;
// For one second we parse GPS data and report some key values
for (unsigned long start = millis(); millis() - start < 1000;)
{
while (ss.available())
{
char c = ss.read();
// Serial.write(c); // uncomment this line if you want to see the GPS data flowing
if (gps.encode(c)) // Did a new valid sentence come in?
newData = true;
}
}
if (newData)
{
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
Serial.print("LAT=");
Serial.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6);
Serial.print(" LON=");
Serial.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6);
Serial.print(" SAT=");
Serial.print(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites());
Serial.print(" PREC=");
Serial.print(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop());
}
#ifdef __DEBUG__
gps.stats(&chars, &sentences, &failed);
Serial.print(" CHARS=");
Serial.print(chars);
Serial.print(" SENTENCES=");
Serial.print(sentences);
Serial.print(" CSUM ERR=");
Serial.println(failed);
#endif
if (chars == 0)
Serial.println("** No characters received from GPS: check wiring **");
}